


科瑞超声波传感器在港机上的应用
一、轮胎吊介绍

轮胎吊是把起重机构安装在加重型轮胎和轮轴组成的特制底盘上的一种全回转式起重机,其上部构造与履带式起重机基本相同,为了保证安装作业时机身的稳定性,起重机设有四个可伸缩的支腿。在平坦地面上可不用支腿进行小起重量吊装及吊物低速行驶。它由上车和下车两部分组成。上车为起重作业部分,设有动臂、起升机构、变幅机构、平衡重和转台等;下车为支承和行走部分。上、下车之间用回转支承连接。吊重时一般需放下支腿,增大支承面,并将机身调平,以保证起重机的稳定。
 二、mic+系列产品介绍
二、mic+系列产品介绍
1、1个或2个pnp或npn开关量输出、模拟量输出4-20 mA和0-10 V 、模拟量+1个pnp开关量输出
2、检测距离从 30 mm 到 8 m,存在5种检测量程
3、可以使用T1或T2按钮来进行microsonic的Teach-in
4、分辨率0.025 mm ~0.18 mm
5、带温度补偿,实现了温度变动下的精确测量
6、支持Link control,可以通过连接电脑来配置传感器参数
 三、应用介绍
三、应用介绍
该轮胎吊两侧各安装了2只mic+340/DIU/TC,此型号为1个pnp开关量输出+1个模拟量输出。客户要求检测距离1390mm+15%,所以设置开关量为区间模式范围为1181.5~1598.5mm,由于现场数据跳动,机器一开动就容易停车,故将回滞修改为100mm。
开关量信号接继电器线圈,当距离达到设定值时,控制机器停车。模拟量信号进PLC,通过 检测吊车侧面到边缘的实时距离,与PLC内部设定的最大值比对,进行轨迹自动纠偏控制。(PLC程序中设置的启动纠偏的最大距离<机器停车的开关量距离)。
当轮胎吊运行时,模拟量输出实时信号,当测量值达到PLC设定的最小值时,说明轮胎吊已经向外跑偏,此时纠偏系统开始启动,轮胎往内侧偏转纠正。当测量值小于设定的最小值,纠偏系统停止。同理当测量值达到PLC设定的最大值时,说明轮胎吊已经向里跑偏,纠偏系统开始启动,轮胎往外侧偏转纠正。一旦测量值达到开关量的设定值,说明轮胎吊已经处于警戒位置,传感器开关量输出信号,继电器断开、设备停车。





 投诉建议
投诉建议
提交

科瑞传感器:基于RFID的涂装车间AVI系统
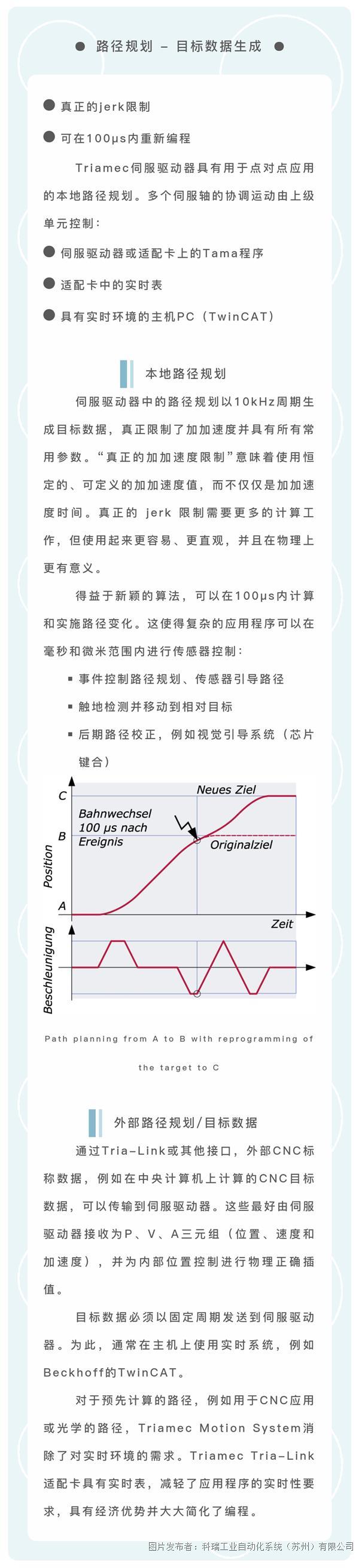
科瑞力摩:Triamec伺服驱动器的路径规划
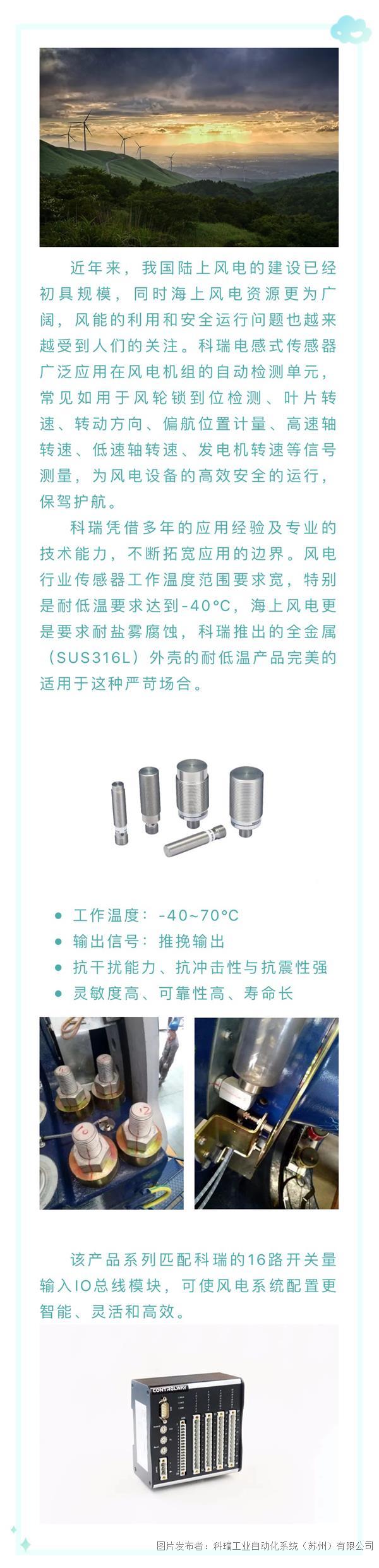
“风”狂发电,科瑞电感来护航

科瑞磁致伸缩传感器:SSI 接口技术介绍

科瑞传感器:逐日转动,控制有我